Como já foi dito, há muitos problemas de computação com aplicações práticas importantes para os quais não conhecemos algoritmos eficientes. Isto posto, uma ideia é investigar a complexidade relativa dos problemas em  . Um problema
. Um problema  não é mais difícil que um problema
não é mais difícil que um problema  se uma solução para implica numa solução para com perda de desempenho polinomial relativa a eficiência da solução de . Façamos isso mais preciso.
se uma solução para implica numa solução para com perda de desempenho polinomial relativa a eficiência da solução de . Façamos isso mais preciso.
Se  e
e  são problemas computacionais de decisão então uma redução em tempo polinomial de para é um algoritmo eficiente
são problemas computacionais de decisão então uma redução em tempo polinomial de para é um algoritmo eficiente  que computa uma função
que computa uma função  tal que para todo instância
tal que para todo instância  de a instância
de a instância  do problema têm a mesma resposta.
do problema têm a mesma resposta.
Escrevemos  .
.
Notemos que se há uma redução de para e  é um algoritmo que resolve então o seguinte algoritmo resolve
é um algoritmo que resolve então o seguinte algoritmo resolve
 Devolva
Devolva  .
.
ademais, se é um algoritmo de tempo  e é um algoritmo de tempo
e é um algoritmo de tempo  então
então  acima tem consumo de tempo
acima tem consumo de tempo  , que é um polinômio sempre que
, que é um polinômio sempre que  for um polinômio. Notemos que
for um polinômio. Notemos que  , ou seja, a saída de tem tamanho polinomial no tamanho de
, ou seja, a saída de tem tamanho polinomial no tamanho de  . Com isso temos
. Com isso temos
Teorema 5 Se  e
e  então
então  .
.
Teorema 6  .
.
Demonstração: Seja  uma instância de
uma instância de  . Considere o algoritmo que com entrada
. Considere o algoritmo que com entrada  constrói o grafo
constrói o grafo  completo sobre
completo sobre  , constrói a função peso
, constrói a função peso  dada por
dada por

e toma  .
.
Se é dado pela matriz de adjacências,  é uma matriz obtida da matriz de trocando
é uma matriz obtida da matriz de trocando  por
por  . O grafo
. O grafo  também e dado por uma matriz da mesma ordem. Assim, a descrição
também e dado por uma matriz da mesma ordem. Assim, a descrição  é obtida em tempo linear de
é obtida em tempo linear de  .
.
Ainda, se tem um circuito hamiltoniano então tem um circuito hamiltoniano de peso  . Se não tem um circuito hamiltoniano então todo circuito hamiltoniano de tem peso
. Se não tem um circuito hamiltoniano então todo circuito hamiltoniano de tem peso  .
. 
Um clique num grafo é um subconjunto de vértices que induz um subgrafo completo, isto é, todos os pares de vértices desse subconjunto são arestas no grafo.  é o problema: dado um grafo e um inteiro
é o problema: dado um grafo e um inteiro  decidir se tem um clique com pelo menos vértices.
decidir se tem um clique com pelo menos vértices.
Uma cobertura num grafo é um subconjunto  de vértices de tal que qualquer aresta de tem pelo menos um vértice em .
de vértices de tal que qualquer aresta de tem pelo menos um vértice em .  é o problema: dado um grafo é um inteiro decidir se tem uma cobertura com no máximo vértices.
é o problema: dado um grafo é um inteiro decidir se tem uma cobertura com no máximo vértices.
Teorema 7  .
.
Demonstração: Dada uma instância  de o algoritmo constrói em tempo linear
de o algoritmo constrói em tempo linear  e toma
e toma  para a instância
para a instância  de
de  . . Seja um clique com
. . Seja um clique com  vértices em . Então para toda aresta
vértices em . Então para toda aresta  em temos que como é independente em no máximo um dentre
em temos que como é independente em no máximo um dentre  e
e  está em de modo que
está em de modo que  é uma cobertura em com
é uma cobertura em com  vértices.
vértices.
Por outro lado, se  é uma cobertura com no máximo vértices em , então
é uma cobertura com no máximo vértices em , então  é independente em , portanto, um clique com vértices em
é independente em , portanto, um clique com vértices em
Uma fórmula booleana satisfazível está em  se todas as suas cláusulas têm exatamente 3 literais.
se todas as suas cláusulas têm exatamente 3 literais.
Teorema 8  .
.
Demonstração: Seja  uma instância de
uma instância de  . Vamos descrever a construção de uma instância
. Vamos descrever a construção de uma instância  de .
de .
Seja  uma cláusula de
uma cláusula de  . A construção de
. A construção de  considera 4 casos de acordo com o número de literais da cláusula:
considera 4 casos de acordo com o número de literais da cláusula:  ,
,  e
e 
Se  , digamos que
, digamos que  , então criamos a variáveis
, então criamos a variáveis  e escrevemos
e escrevemos

que corresponde à fórmula

Dessa forma, qualquer atribuição que faça  verdadeira, faz
verdadeira, faz  verdadeira e qualquer extensão de uma atribuição que faça
verdadeira e qualquer extensão de uma atribuição que faça  faz verdadeira.
faz verdadeira.
Se  , digamos que
, digamos que  , então criamos a variáveis
, então criamos a variáveis  e escrevemos
e escrevemos

que corresponde à fórmula

Dessa forma, qualquer atribuição que faça verdadeira, faz verdadeira e qualquer extensão de uma atribuição que faça faz verdadeira.
Se  então
então  e
e  .
.
Finalmente, se  , digamos que
, digamos que  , então criamos as
, então criamos as  variáveis
variáveis  e fazemos da seguinte forma
e fazemos da seguinte forma
e fica como exercício verificar que se é satisfazível se, e só se,  é satisfazível. Com isso, a fórmula é dada pelas variáveis
é satisfazível. Com isso, a fórmula é dada pelas variáveis  e pelas cláusualas
e pelas cláusualas  .
.
Resta mostrar que essa construção pode ser feita em tempo polinomial no tamanho da descrição de .
 é a linguagem definida pelo problema de decisão: Dado um grafo e um natural decidir se contém um clique com vértices.
é a linguagem definida pelo problema de decisão: Dado um grafo e um natural decidir se contém um clique com vértices.
Teorema 9  .
.
Demonstração: Seja  uma instância de e vamos construir uma instância
uma instância de e vamos construir uma instância  de .
de .
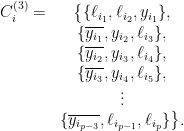
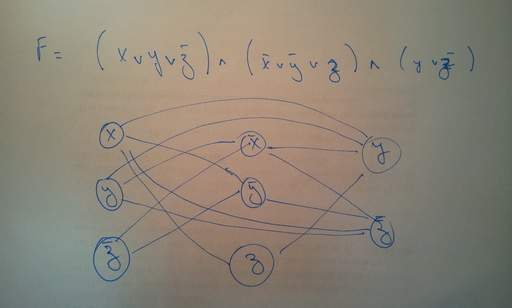
Se tem cláusulas  então tem
então tem  vértices denotados
vértices denotados  , para
, para  e
e  . O vértice corresponde ao literal
. O vértice corresponde ao literal  da cláusula
da cláusula  , denotado
, denotado  . As arestas são dadas pelos pares de vértices
. As arestas são dadas pelos pares de vértices

com  (correspondem a cláusulas diferentes) e cujos literais podem ser simultaneamente verdadeiros (não contraditórios). Notemos que
(correspondem a cláusulas diferentes) e cujos literais podem ser simultaneamente verdadeiros (não contraditórios). Notemos que  corresponde a um conjunto independente
corresponde a um conjunto independente  em .
em .
Seja uma atribuição que satisfaz todas as cláusulas de e sejam  um literal com valor
um literal com valor  de cada cláusula. Então
de cada cláusula. Então  é um clique com -vértices em .
é um clique com -vértices em .
Agora, suponha que tem um clique com pelo menos vértices. Seja  um subconjunto de vértices de cardinalidade que define um clique em . Como vértices da mesma cláusula não são adjacentes, devemos ter um vértice correspondente a cada cláusula de . Definimos a seguinte atribuição na variáveis de : se é uma variável que corresponde a um vértice de então
um subconjunto de vértices de cardinalidade que define um clique em . Como vértices da mesma cláusula não são adjacentes, devemos ter um vértice correspondente a cada cláusula de . Definimos a seguinte atribuição na variáveis de : se é uma variável que corresponde a um vértice de então  é verdadeiro, caso contrário, é falso. Assim satisfaz todas as cláusulas.
é verdadeiro, caso contrário, é falso. Assim satisfaz todas as cláusulas.
Resta mostrar que essa construção pode ser feita em tempo polinomial no tamanho da descrição de . Basta notar que tem vértices portanto construímos uma matriz de tamanho  que é polinomial no tamanho da representação de .
que é polinomial no tamanho da representação de .
Exercício 5  é o problema: Dado um grafo e um natural decidir se contém um conjunto independente com vértices. Prove que
é o problema: Dado um grafo e um natural decidir se contém um conjunto independente com vértices. Prove que  .
.
— NP-completude —
Um problema é  -difícil se todos os problemas em não são mais difíceis do que no seguinte sentido:
-difícil se todos os problemas em não são mais difíceis do que no seguinte sentido:

Suponhamos que tenha um algoritmo  que o resolve em tempo
que o resolve em tempo  e seja a redução de
e seja a redução de  para que consome tempo
para que consome tempo  para algum natural . Então, se é uma instância de tamanho
para algum natural . Então, se é uma instância de tamanho  para ,
para ,  é uma instância de tamanho para cuja resposta
é uma instância de tamanho para cuja resposta  é computada em tempo
é computada em tempo  . Portanto,
. Portanto,
Teorema 11 Se algum problema -difícil tem algoritmo eficiente, todos os problemas em têm algoritmo eficiente, isto é,  .
.
Um problema é -completo se
 ,
,- é -difícil.
Como consequência dessa definição e da proposição acima
Corolário 12 Se algum problema -completo tem algoritmo eficiente então .
Proposição 13 Se algum problema -completo não tem algoritmo eficiente então nenhum outro problema -completo tem, isto é  .
.
Demonstração: Exercício.
Proposição 14 Se é -completo e então é -difícil.
Demonstração: Exercício.
Teorema 15 (Cook e Levin, 1970) é -completo.
Corolário 16 é -completo.
Demonstração: Vimos que , portanto, é -difícil. Claramente, está em (por quê?).
Corolário 17 é -completo.
Demonstração: Vimos que , portanto, é -difícil. Fica como exercício para o leitor verificar que está em .
Corolário 18 é -completo.
Demonstração: Vimos que , portanto, é -difícil. Fica como exercício para o leitor verificar que está em .
Além desses, dos outros problemas citados nestas notas, é sabido que é -completo e que  é -completo. Uma curiosidade: em maio de 2004, o problema caixeiro-viajante nas 24.978 cidades da Suécia foi resolvido (veja aqui).
é -completo. Uma curiosidade: em maio de 2004, o problema caixeiro-viajante nas 24.978 cidades da Suécia foi resolvido (veja aqui).
Há muitos problemas -completos. São tantos e tão pesquisados que muitos pesquisadores acreditam que  simplesmente porque se houvesse um algoritmo eficiente para algum desses problemas ele certamente já teria sido descoberto. Veja aqui uma lista de problemas -completos.
simplesmente porque se houvesse um algoritmo eficiente para algum desses problemas ele certamente já teria sido descoberto. Veja aqui uma lista de problemas -completos.